아주대 연구팀 “사람 손처럼 미세한 물체 집거나, 작업 가능”
3mm달팽이알 부화, “인공수정 등 의료와 산업분야 폭넓게 응용”
[애플경제 김홍기 기자]
사람의 손가락과 똑같은 감각과 기능을 가진 로봇 손가락이 탄생했다. 최근 미세한 물건을 집어올리거나, 생명체의 심장박동이나 맥박과 같은 생체신호를 감지할 수 있는 5mm크기의 초소형 소프트 로봇(그리퍼)가 세계 최초로 국내 과학자들에 의해 개발되었다. 아주대학교 자연모사연구실의 한승용, 강대식, 고제성 교수팀이 개발한 이 로봇은 장차 “나아가선 인간의 세포도 기계적으로 상처 없이 잡아 원하는 위치에 고정하거나, 자극에 대한 반응을 분석 할 수 있는 플랫폼으로 발전시킬 수 있다”는 설명이다.
14일 이 사실을 공개한 과학기술정보통신부에 따르면 연구팀은 애초 ‘만물의 영장’인 인간의 손에 착안한 것으로 알려졌다. 연구팀의 설명에 의하면 “자연계에 존재하는 다양한 동, 식물의 그리퍼 중 유일하게 ‘사람의 손’은 5개의 손가락을 독립적으로 움직일 수 있어 잡은 대상을 섬세하고 정확하게 다룰 수 있다.”면서 “또한 감각 세포의 집중으로 대상의 상태를 느끼고 구분할 수 있기 때문에 ‘사람 손’이야말로 동물과 사람을 구분하는 가장 큰 요소이며 사람이 ‘만물의 영장’이 될 수 있는 역할을 했다”는 것이다.
그 때문에 현재 다양한 분야에서 사람의 손 기능을 모사하기 위한 연구들이 진행되고 있다. 특히 사람과 교감할 수 있는 로봇이나 의료용 로봇에 대한 수요가 늘어나고 있는 가운데, 이에 적합한 “인체 친화적이면서 부드러운 물질 기반 소프트 로봇 연구가 각광 받고 있다.”는게 연구팀의 연구 배경이다.
현재 실용화된 그리퍼 용도의 로봇들은 단순히 대상을 집어 올리거나 붙잡기 위한 용도로만 쓰인다. 또 금속이나 플라스틱 등 단단한 물질로 만들어지다보니 연하고 깨지기 쉬운 물체를 잡는데는 한계가 있었다. 그렇다고 부드러운 물질을 활용한 그리퍼 역시 대상을 강하게 고정하거나 무거운 물체를 들어 올리는데 한계가 있다. 또 로봇 안에 집어올리는 물체의 신호를 받는 등의 용도로 센서를 내장하기도 어려웠다. 센서를 내장할 경우엔 부피가 커져 미세한 물체를 잡는데 어려움이 따랐기 때문이다.
그러나 이번 아주대 연구팀은 “경도(단단함)와 연성(부드러움)을 조절할 수 있는 소재인 형상기억폴리머를 활용해서 생명체의 피부와 비슷한 기계적 특성을 구현하고, 아주 얇은 은나노선과 레이저 공정을 활용하여 센서의 크기를 줄여 로봇의 크기를 길이 5mm 이하로 줄이는 데 성공했다.”고 밝혔다. 연구팀에 의하면 형상기억폴리머는 폴리우레탄 계열의 폴리머로서 변형을 해도 유리 전이온도 이상에서 본래 형상으로 돌아가는 스마트 소재를 말한다.
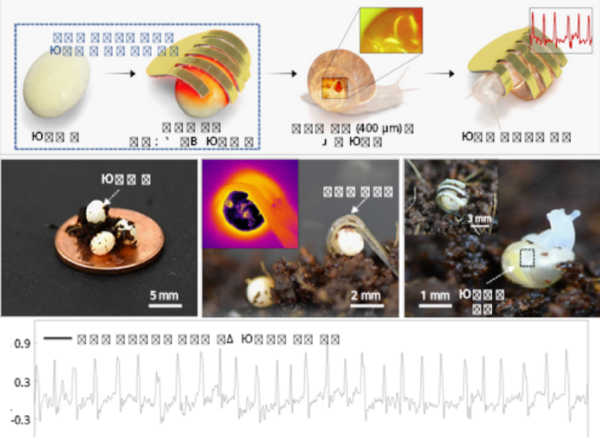
이렇게 개발된 손가락 로봇(소프트 그리퍼)은 터지기 쉬운 연어 알을 전혀 문제없이 집어올리고, 손가락 로봇 자신보다 6,400배 무거운 추를 오랫동안 들어 올리는 괴력을 과시했다는 설명이다. 또한 손가락 로봇 안에 은 나노와이어와 크렉 기반의 스트레인 센서를 내장, 3 mm보다 작은 초소형 생명체의 생체 신호를 측정하고, 자극을 줄 수도 있다.
아주대 연구팀은 개발 과정을 재삼 소상하게 소개했다. 즉 “기존 그리퍼의 한계점을 극복하기 위해 부드러움과 딱딱함을 필요에 따라 조절 가능한 가변강성 형상기억폴리머를 활용하여 사람 손 형상의 소프트 그리퍼를 제작하였고 마이크로미터에서 밀리미터 크기의 작은 생명체를 상처 없이 강하게 고정 및 위치 이동에 성공했다.”고 밝혔다.
연구팀은 “또한 소프트 그리퍼 안에 은 나노와이어와 고민감도 크랙 (Crack) 센서를 결합하여 잡은 대상의 생체 신호를 측정하는 동시에 자극을 줄 수 있는 상호 교감형 소프트 그리퍼를 제작하였다.”는 것이다. 즉 “잡고 있는 물체의 미세한 움직임을 측정하고, 은나노선을 통해 대상에 열적 자극도 전달할 수 있으며, 이를 통해 물체로부터의 신호를 모니터링 하는 동시에 자극을 주는 양방향 입출력이 가능하도록 했다”는 것이 연구팀의 설명이다.
손가락 로봇은 또 3mm보다 작은 달팽이 알을 저온에서 상처 없이 잡아 열을 주어 부화 시키고, 부화 과정의 미세한 기계적 움직임을 측정하였다. 또 부화 직후 달팽이의 미세 심장 (300~400 마이크로미터) 박동수를 정확히 측정하기도 했다. “이는 마이크로 단위의 미세 장기를 상처 없이 기계적으로 잡아 미세 생체 신호를 성공적으로 측정하는 최초의 사례”라는게 연구팀의 소개다. 또한 살아있는 돼지 혈관을 상처 없이 잡고 맥박을 측정하기도 했다.
연구팀의 한승용 교수는 “이번에 개발된 그리퍼(손가락 로봇)은 많은 난제들이 쌓여있는 사람의 세포 레벨에서 생명체의 기계적 움직임이나, 자극 후 반응을 분석할 수 있는 새로운 플랫폼으로 사용될 수 있다”고 했다. 그는 “예를 들어, 인공수정 과정에서 현재는 난자를 정전기력을 이용하여 고정하고 있지만 고정력이 높지 않아 세포 주입 시 실패율을 높이는 하나의 원인으로 작용하고 있다.”면서 “이 그리퍼는 세포에 상처 없이 기계적으로 강하게 고정할 수 있는 플랫폼으로 활용될 수 있을 것”이라고 기대했다. 또 측정과 동시에 자극도 줄 수 있어 의료 분야에서 진단 및 치료 과정의 모니터링에 활용 가능할 것이란 전망도 곁들였다.
과학기술정보통신부 개인기초연구(신진연구) 사업의 지원으로 개발된 이 로봇은 로봇 분야 세계최고 권위 학술지인 국제학술지 사이언스 로보틱스(Science Robotics)에 14일 게재되었다.